
本稿の第1回、第2回で、基本的な技術進展としての単一技術の「技術成熟度 vs. 時間」、並びに第3軸としての質的進化を表す「技術世代」を提唱した。更に第4回では、技術統合に向けた第4の「技術階層」軸を定義した。それでは、これらの4種の進展軸の相互関係はどう表現できるであろうか。
まず、第4の軸である技術階層を固定した場合、技術成熟度 vs. 技術世代の切り口が考えられるが、ある程度の幅の時間域に限って「技術成熟度 vs. 時間」のカーブを「技術成熟度 vs. 技術世代」の面に投影することができる。図5-1にその様子を示すが、それが図5-2(1)に示す技術階層ごとの特定時間域(赤字で示す)における技術成熟度ロードマップになるであろう。一方、図5-1の各技術世代の進展を世代軸の方向(技術成熟度−時間 面)に投影したものが図5-2(2)である。図5-2においては2元のロードマップであるため、時間(年)、技術成熟度、技術世代のうち、水平軸と垂直軸に現れない3番目の指標をパラメータとして表示している。
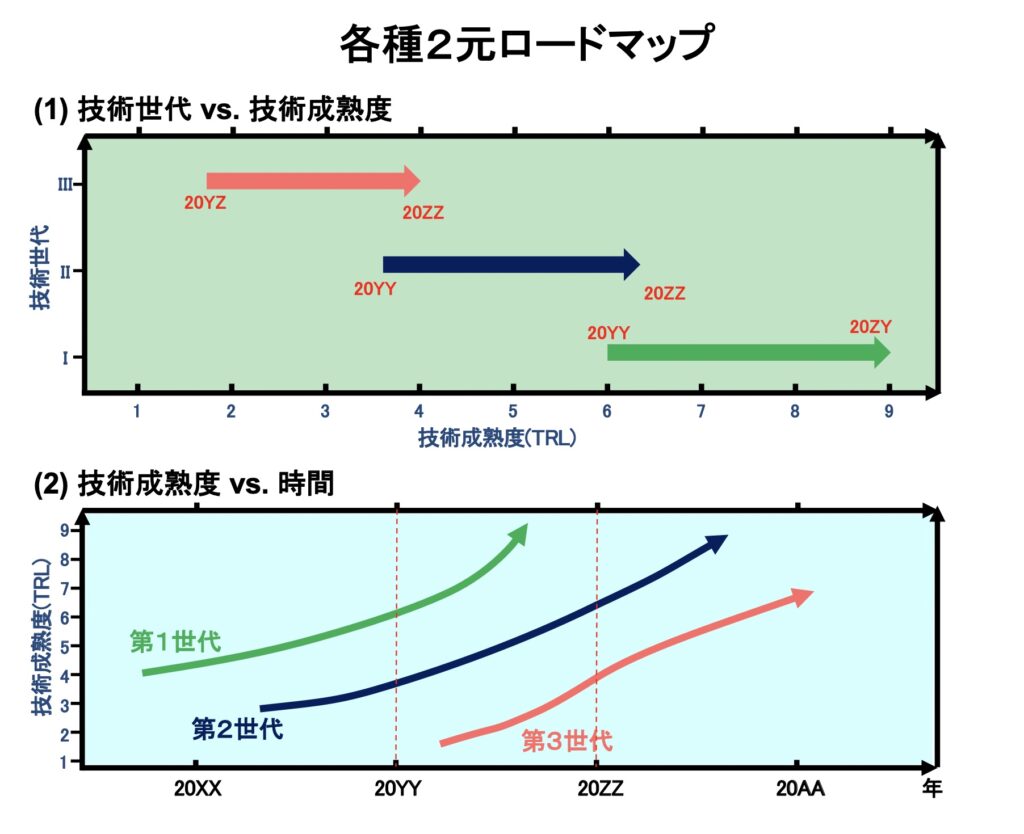
さて図5-2(2)を技術世代と技術成熟度の観点で見てみると、より上位の技術世代では技術成熟度がより進んだ状態から出発しているわけでは必ずしもないと言う点に留意頂きたい。一般的に上位の技術世代はより難易度が高く、出発時点の技術成熟度は下位の技術世代に対してむしろ進展していないケースがほとんどであろう。その結果、ある時点において、技術成熟度がより進んだ下位世代技術と技術成熟度がまだ不十分な上位世代技術が併存することになる。第2回の技術世代の議論でも述べたが、技術世代間は質的に異なる不連続な進展であり、それ故、新たな世代技術をいかにして生み出すかが技術開発推進の上では大きな方法論的課題である。


コメントを残す