
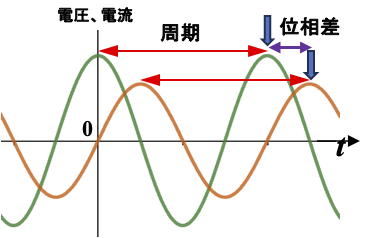
さて、ここからは交流送電における「相差角」の観点からの議論を進めてみよう。交流回路においては、一般に電圧や電流は図3のようにプラス側とマイナス側を行き来する同じ周期の振動波形を取るが、その波形間に位相差が生じることはよく知られている。位相差とは、言い換えれば二つの波形がそれぞれ最大値(最小値)を取る時刻間に生じる時間差のことであり、電圧-電流のみならず、異なる場所での電圧間にも発生する。交流の場合、負荷のインピーダンスZは、通常の抵抗性成分R、コイルのインダクタンスを主体とする誘導性成分ω L、コンデンサのキャパシタンス(容量)を主体とする容量性成分1 / ω Cからなるとされるが、この表式からわかるようにそれらは周波数ω(発電機の角速度と同義)に依存し、その結果V = Z・Iの関係にあるVとIの間に位相差が発生する。その位相差を複素数角度表示したものをθ で表す(一周期の時間を360˚と定義)と、ある地点を通過する電力はV・I cosθ となることが知られている。式(2)のcosθ も同じ意味である。また、複素数表示ではインダクタンスやキャパシタンスはZの虚数部としてZ = R + j X と表され、Xはリアクタンスとして誘導性成分ω Lと容量性成分1 / ω C から回路構成に応じて定義される値となる。
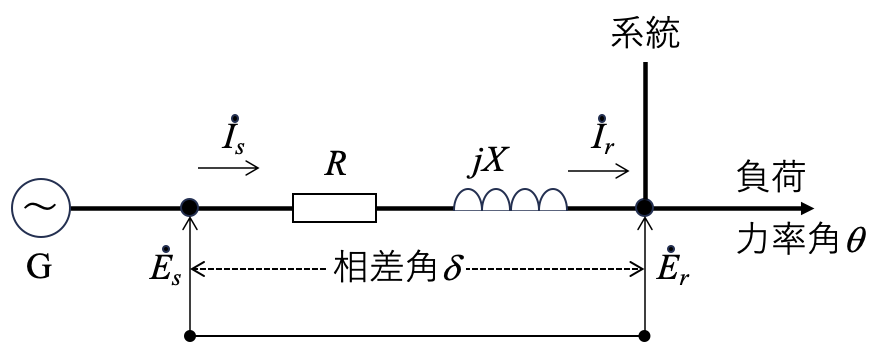
ここで、図4のような発電機、送電線、負荷からなるシステムを想定してみよう。前半での議論との違いは、このシステムが無限大の電力供給能力を持つ系統に繋がっており、負荷側に対する出力電圧が一定Erに保たれているとすることである。この系では、

(5)
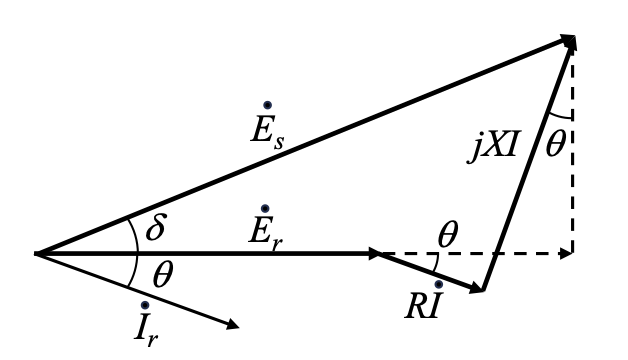
と言う関係式が電気回路の基本法則として知られるキルヒホッフの法則から成りたつ。● は、各変数の複素数としてのフェーザ表示を表す。以後 ● 無しの変数名はその絶対値を表す事とする。交流回路の常として、送電側電圧Esと受電側電圧Erの間には、負荷側の位相差角θ (力率角)とは別に送電線のリアクタンスXによって位相差角δ が生じるが、このδ が「相差角」と定義されているものである。この状況を交流の議論でしばしば用いられるいわゆる「ベクトル図」(複素数表示したものを、実数部と虚数部からなる2次元のベクトルとして表現したもの)で表すと図5のようになる。
さて、送電線受電側における有効電力Pと無効電力Qは、R / X << 1 の条件下(送電線のインピーダンスはほとんどリアクタンス成分のみ)で
P = (Er・Es sin δ ) / X 、Q = (Er・Es cos δ – 2Er 2) / X
(6)
と表される。この式から、送電線を介して効率よく電力を送るためにはδ は90˚に近ければ近いほどよいことになる。
では、相差角δ と負荷のインピーダンスZとの関係は具体的にどのようになるであろうか。負荷側ではEr = |Z|・I の関係があり、図5を考慮すると次の関係が導かれる。
tan δ = (X cos θ – R sin θ ) / (|Z|+ R cos θ + X sin θ )
= (cos θ – (R/X) sin θ ) / (|Z|/X + R/X cos θ + sin θ )
≈ (cos θ ) / (|Z|/X + sin θ )}(R/X << 1)
(7)
この(7)式からわかる様に、δ は負荷の複素インピーダンスZ(絶対値 |Z|と力率角θ で表現)と複雑な関係で結びつけられている。
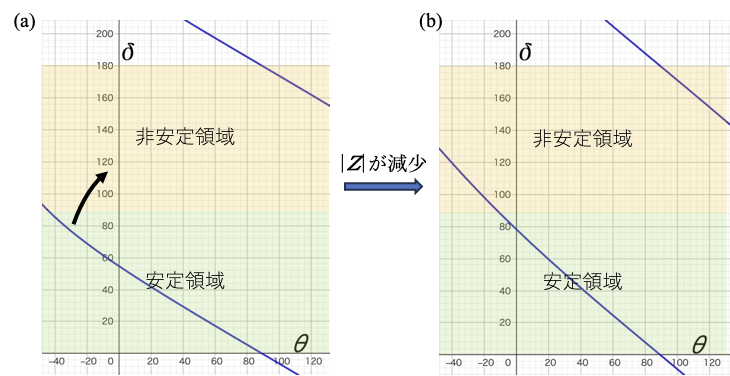
(7)式は相差角δ の定常状態での値と負荷のインピーダンスZの関係を規定しているが、ここで最初のエネルギー保存則に基づく議論に準じて、負荷が多くその全体的なインピーダンスZが小さい場合、或いは準静的に減少した場合に何が起こるであろうか。直流的な扱いとの差違として、|Z|のみならず力率角θ も考慮する必要がある。図6に|Z|が異なる二通りのケースにおけるδ – θ の関係を示す。特に力率角θ が零近傍の場合に注目頂きたい。図6からわかることは、負荷側の特性であるθ や|Z|が小さければ、送電システムの特性としてのδ が90˚により近い値を取るということである。
受電端電圧Er、及び送電ライン特性としてのR、Xが与えられた場合、負荷特性Z(|Z| 及びθ )に基づいて定常状態としてのδ が上記の様に決まるが、その際に必要となる送電端電圧Esも次のように求まり、定常状態を維持するためには発電機への機械的入力パワーPmを発電機からの電磁的出力パワーPeにバランスする様に然るべく調整する必要がでてくる。
Es = (Er / cos δ ) {|Z| + R cos θ + X sin θ } / |Z|
≈ (Er / cos δ ) {1 + (sin θ /(|Z|/X)) }(R/X << 1)
(8)
さて、(7)式と図6では機械的入力パワーN+ ω(= Pm)と負荷のインピーダンスZで決まる電磁的出力パワーN– ω(=Pe)がバランスした定常状態を考えてδ(及びEs)がどのように決まるかを論じたわけであるが、定常状態に対する微小な擾乱が発生した場合のδ の経時変化に関して、よく次のように説明されている。初期の定常状態としてδ が0˚ < δ < 90˚の範囲にある状態を考える。0˚ < δ < 90˚ではdP / dδ = (Er・Escosδ ) / X > 0であることから、δ が増えればPが増加、負荷側での表式P = Er・I cosθ から言い換えるとIが増加する。図5のベクトル図からも、Iの増加と送電ラインのリアクタンスXを介したδ の増加が対応していると直感的に理解できる。そしてIの増加は(1)式の減速トルクN– ∝ Iの関係から発電機のω を減少させる方向に働く。その結果、今度は送電側電圧Es(= α ω )及び線路リアクタンスX(= Lω )の減少を介して送電線を通過するIが減少してそれが結果的にPを減少させることにつながり、いわゆるδ の変動に対して負のフィードバックがかかることになる。これが発電機の同期運転の背景である。一方、90˚ < δ < 180˚の領域では逆の正のフィードバックがかかる。言い換えれば、0˚ < δ < 90˚ではδ の変動に対して復元力が働く安定領域であるが、90˚ < δ < 180˚の領域は一旦δ の増加が起こればそれが拡大する不安定領域である。実際には、発電機からの電力送出が困難になりその回転角速度、即ち周波数がどんどん増大してゆく。この現象は「脱調」と呼ばれており、最終的には発電機を停止せざるを得なくなる。このため、運転の安定性からはδ は90˚より余裕を持って小さい領域にあることが望ましい。実際の送電においては、(6)式から導かれる効率とこの安定運転の二律背反条件ため、δ として50˚〜60˚の範囲で運用されているようである。
上記の挙動を、動的視点を取り入れてδ に関する運動方程式から考えてみよう。系統側の角速度、即ち当該発電機の回転子の定常状態での角速度ω0 と回転子の角度Θ の間には Θ = ω0 t + d の関係があるため、回転子の角速度ω とδ の間には
(9)
の関係が成り立つ。この式を(1)式代入すると、δ の運動方程式として
(10)
Pm(機械的入力パワー)= N+ ω
Pe(電磁的出力パワー)= N– ω = (Er・Es sinδ ) / X
が導かれる。この(9)式はPeが複雑にω に依存しているため、厳密解を簡単な形に書き表すことは困難である。しかしδ に関する二階の微分方程式であることから、近似的/局所的には復元力と各種の損失にもとづく減衰振動として扱うことができ、δ の初期値 δ t=0 と変化率(速度に相当)の初期値dδ / dt t=0を与えれば解が求まる。先の定性的な議論では、0˚ < δ < 90˚の安定領域ではPm < Peであることから負のフィードバックがかかる(ω の減少)と説明されたが、減衰振動になぞらえれば負のフィードバックがかかってある値に収束するという結論はイメージし易いであろう。しかし、この描像は負荷のインピーダンスZによる擾乱としてZの変化量やその変化率が小さい場合に限られる。
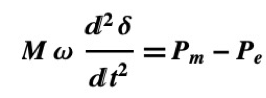
実際の相差角の挙動をもう少し広い範囲で議論する際には、いくつか注意すべきポイントが存在する。まず、(9)式のPeの表式から定常状態への復元力(dPe / dδ ∝ cosδ )がδ が90˚に近いほど弱くなっていくことに留意しなければならない。また、微小擾乱とは異なりZの減少(負荷の増加)が一定時間続くようなら(図7参照)それに伴う総負荷電流Iの増加に対応するため、機械的入力トルクN+を増加させる措置が取られて、エネルギー収支のバランスが取れる新たなδ の値(δ∞)が定常状態となる。そしてより重要なのは、このZの変動(変動の終了時点をt = 0とする)に起因するδ のt < 0での変動過程の結果である初期値 δ t=0 とdδ / dt t=0が(9)式の解のその後の挙動に大きく影響することである。この詳細を以下に示すが、議論のポイントは、Pm – Peが決めているのがδ の速度dδ / dtではなく加速度d2δ / dt2であるという点である。(6)式に基づきδが一旦増加すればPm < Peとなってδ の速度dδ / dtは減少する(δ の加速度d2δ / dt2が負の値を取る)。しかし、dδ / dt t=0が正の有限値であればδ 自体はすぐには減少に向かわない。言い換えればt = 0以前におけるZの変化の大きさや変化率、変化している持続時間、更にはZの変化にバランスする様に調整されるPmの変化過程等によっては、δ の速度初期値dδ / dt t=0が十分大きな正の値を持つことができ、δ がそのまま増加し続けてδ > 90˚の非安定領域に突入してしまう可能性があるということである。このような状況は初期値 δ t=0 の値にも依存しており、δt=0 が90˚に近ければ近いほど、非安定領域に入りやすい。定常状態への復元力がδ が90˚に近いほど弱くなると言う状況が更にこの状況に拍車をかけている。図7では、これらの状況を初期値が異なるいくつかのケースとして示しているが、微小擾乱やZの変動によって引き起こされるδ の挙動が、δ t=0 とdδ / dt t=0の値に大きく影響を受けることが視覚的によく理解できるかと思う。
上記の相差角の経時変化の議論を踏まえて図6の意味を再度振り返ってみると、急激なδ の変動でなくても発電機の定常運転状態としてのδ が90˚に近い場合、何も対応措置をとらなければZのちょっとした擾乱や変動で脱調現象を引き起こす可能性が高まっていることになる。また実際の安定的運用のためのδ に余裕がなくなり、落雷や地絡事故等への対応力が低下するなどシステムとしての脆弱性が増すことでもある。
本記事で今まで論じてきた相差角の議論では、受電側は一定電圧Erを保つ系統に繋がっていると仮定してきたが、それは局所的な発電機と負荷のエネルギー収支が合わない場合に系統からの電力の出入りでそれが補償されるという意味である。そして、そのような無限大の電力を供給できる系統というものは現実には存在しない。どこかの発電機が上記で述べたような何らかの障害で系統から離脱すれば、当然系統全体の電力の供給能力をそぐことになり、発電機全体と負荷全体をそれぞれ一体として考えれば、本記事の前半で述べたようにエネルギー収支バランスから、系統全体の電圧と周波数の低下をもたらすことになる。
以上、エネルギー保存則と相差角の二つの観点から、電力システムにおいて負荷が大きく変動した場合、然るべき対応措置を取らなければ何が起こるかを議論してきた。いずれの議論からも、全体システムが電圧や周波数と言った定格を維持できない状態に陥り、場合によっては機器の損傷に繋がることが示唆される。
実際の電力システムの運用としては、通常はそのような事態に陥らないないよう、負荷が増えた場合にはまずは発電機動力としてトルク、ないしはパワーを増やすことになるが、注意して行わないと発電機の脱調をもたらす。また、発電機動力にも限界がありそれを超えるとどうにもならなくなる。更に系統全体の中で考えるならば、発電機の損傷に陥る事が予見されるとその前に保安装置を働かせて当該発電機を停止させて系統から切り離す様なことも行われるが、逆に負荷側からすると個々の発電機の離脱は、全体のパワーバランスをより悪化させかねず、連鎖的な発電機の離脱は電力ネットワーク全体の安定的稼働を困難にし、最終的にはブラックアウトをもたらす。一方で、停止/切り離した発電機の補填として新たな発電機を起動させる方策も考えられるが、一般に大型の発電機の起動を瞬時に行うことは動力源の起動も含めてほとんど不可能であり、大規模な負荷変動に対して系統全体を安定状態に維持することは、大規模電力システムとして解決すべき深刻な課題として、依然積み残されているようである。
本連載(1)〜(4)はメンバー全員(樋口、坂本、松畑、氷見、奥村)で議論し、その結果をまとめたものです。
(完)


コメントを残す